






Експонат на Amuseum
Дата на включване в каталога: 24 август 2019
Последна редакция: 24 август 2019
Историята на експоната вижте тук
| Състояние | Задоволително. Търся по-добри екземпляри, по възможност с оригиналната опаковка |
| Показан за първи път |
1980? |
| Години на производство |
Неизвестни. Нашите експонати са произведени съответно през 1985 и 1987 година. Предполагам, че е произвеждан до 1990 година. |
| Произведени бройки |
Имам непотвърдена информация за около 17 000 броя. По някаква невероятна случайност два от експонатите са с еднакви номера 443 и еднаква година на производство, затова приемам, че или им е заяждала пишещата машина или не е имало някаква смислена проследимост... |
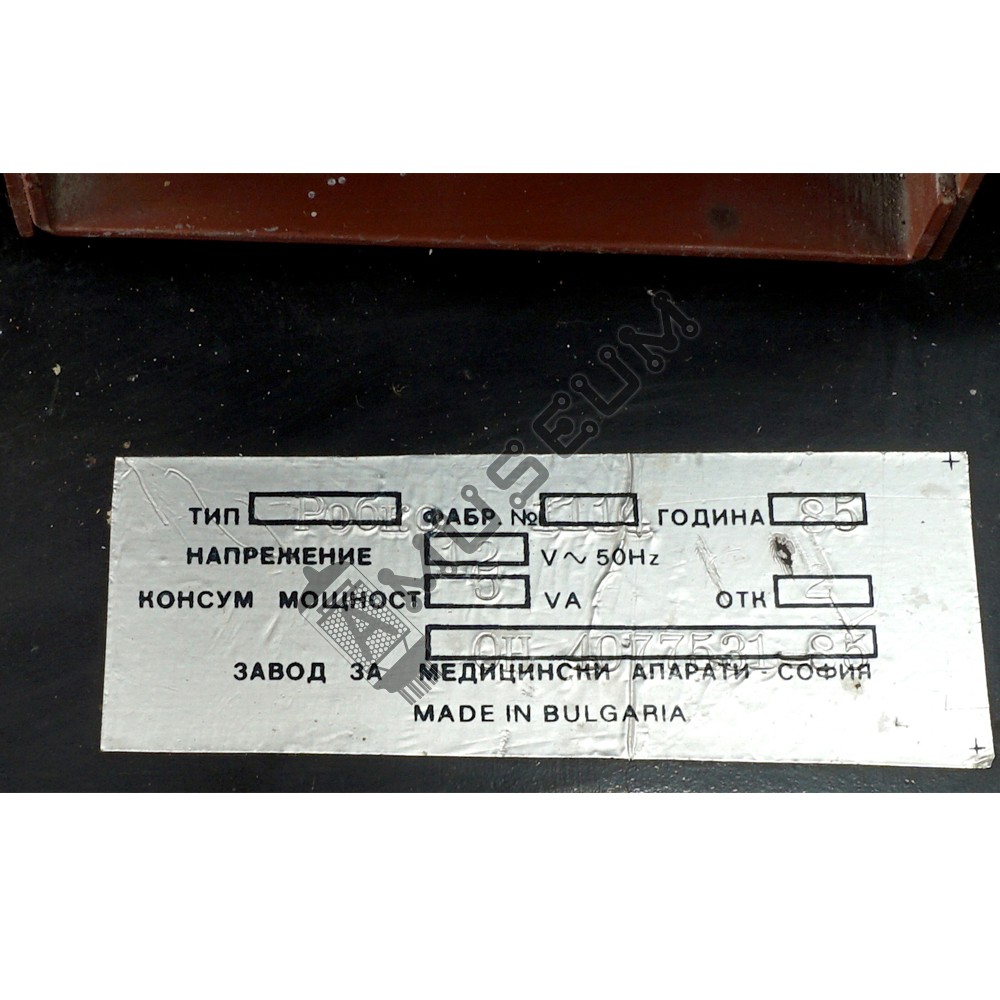
| Производител | Завод за Медицински Апарати София |
| Захранване | 12В, 5А |
| Размер и тегло |
| Цвят | Червен, оранжев и жълт. Издирвам зелен и черен. |
РОБКО-01 e български учебен антропоморфен робот (робот-ръка) с 5 степени на подвижност. Разработен е в ИТКР-БАН с цел обучение по роботика и кибернетика. Проектиран е за работа с „ИМКО-1“ и последвалите го „ИМКО-2“ и „Правец-8“.
Роботът е създаден по западен образец, Microbot Mini Mover 5 (подозрителна прилика). Двата робота са напълно аналогични по функционални възможности с малки разлики в механиката и основни такива в управлението. (непотвърдени данни)
ОБЩИ ХАРАКТЕРИСТИКИ
- управлява се от 8-битов компютър ПРАВЕЦ 8;
- задвижва се с помощта на стъпкови електродвигатели;
- конструкцията на робота осигурява нагледност на кинематиката и задвижването;
- притежава богати възможности за програмно осигуряване в различни координатни системи;
- правилата за работа са сравнително прости и лесно усвоими дори за начинаещи;
- осигурява безопасност при работа;
ТЕХНИЧЕСКИ ХАРАКТЕРИСТИКИ
- степени на свобода - 5;
- радиус на работния обем - 356 mm;
- отклонение при многократно позициониране (повторяемост) - 1 mm;
- точност на повторение на обучената точка - 5mm;
- товароносимост - 1500g
- захранване - 12 V;
- консумация — до 5 А;
- възможност за 7 входа и 8 изхода за връзка с външно оборудване, включително:
- Учебна въртяща маса. Предназначена е за кръгово преместване на детайли, довеждането и отвеждането им от роботизирано работно място и др.
- Учебен конвейер за линейно преместване на детайли, довеждането и отвеждането им от учебно роботизирано работно място и други цели.
- Сензорен фотооптичен хващач. Реагира при наличието на обекти между пръстите на хващача. Монтира се към Робко-01 и наличието му дава адаптивни възможности на робота.
- Магнитен хващач. Дава възможност за манипулиране на магнитно чувствителни материали с тегло до 50 g. Монтира се към Робко-01
Ако разполагате с повече информация за този експонат, моля споделете с музея тук.